It seems simple at first. The Moon and Mars are less massive than Earth and have weaker gravity. To test how a rover will traverse their surfaces, engineers make less massive engineering versions of rovers and test them in simulated surface conditions here on Earth. Since the Moon's gravity is six times weaker than Earth's, for example, engineers make versions of lunar rovers that are one sixth as massive. The data then tells engineers what they need to know.
However, rovers keep getting stuck. NASA's Spirit rover ended its mission when it got stuck in deep sand. It couldn't free itself and orient its solar panels toward the Sun. Without the ability to recharge its batteries, the rover eventually succumbed to Mars' frigid conditions.
Researchers have figured out why, and now that they know, it seems obvious.
The weaker gravity of the Moon and Mars not only affects how the rovers behave, it also affects how loose driving surfaces behave, since they're also subject to weaker gravity. Here on Earth, sandy, loose surfaces are subject to greater gravity and are more solid. The reverse is true on the Moon and Mars. These loose surfaces aren't as stable.
Engineers at the University of Wisconsin-Madison found this flaw and reported it in new research. It's presented in a research article titled "A Study Demonstrating That Using Gravitational Offset to Prepare Extraterrestrial Mobility Missions Is Misleading" in the Journal of Field Robotics. Dan Negrut, a professor of mechanical engineering at UW–Madison, led the research.
"Recently, there has been a surge of international interest in extraterrestrial exploration targeting the Moon, Mars, the moons of Mars, and various asteroids," the authors write. "This contribution discusses how current state-of-the-art Earth-based testing for designing rovers and landers for these missions currently leads to overly optimistic conclusions about the behavior of these devices upon deployment on the targeted celestial bodies."
At issue is what engineers call terramechanics. Terramechanics is the study of how vehicles travel over deformable terrain like sand, gravel, snow, and mud. In order to design a vehicle effectively, engineers need to know how wheels or tracks respond when moving across surfaces that can shift underneath them. M.G. Bekker, an engineer and professor originally from Poland, initiated the field of terramechanics, and worked on armoured vehicle designs in Canada during WW2.
One of the core concepts of terramechanics is understanding how different surfaces respond under stress. How much load can they bear? What are their shear strengths? How do their properties affect a vehicle's performance?
“In retrospect, the idea is simple: We need to consider not only the gravitational pull on the rover but also the effect of gravity on the sand to get a better picture of how the rover will perform on the moon,” Negrut said in a press release. “Our findings underscore the value of using physics-based simulation to analyze rover mobility on granular soil.”
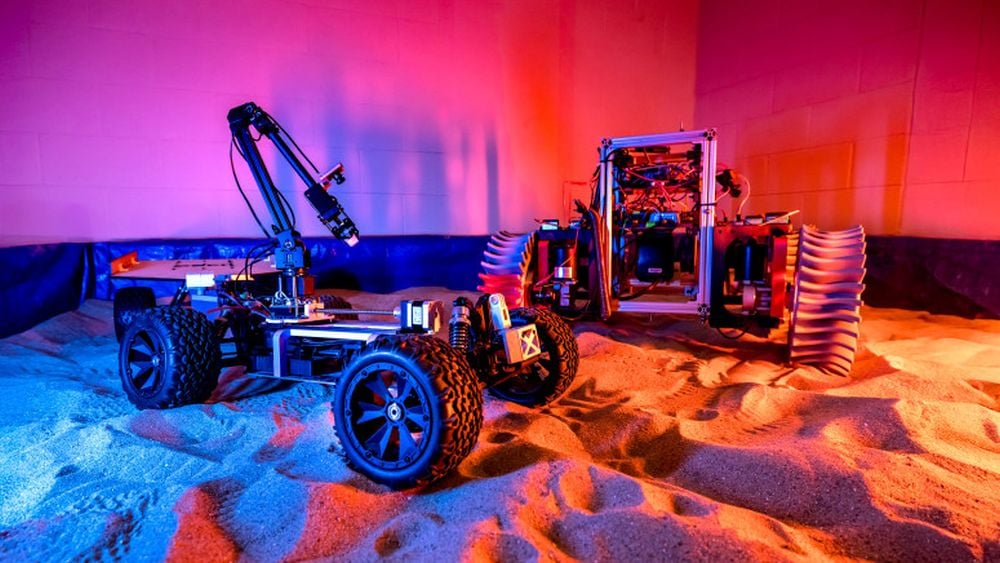 A rover on sand in the Simulation-Based Engineering Lab. The researchers discovered discrepancies between the Earth-based testing and the Chrono physics simulation. Image Credit: Joel Hallberg
A rover on sand in the Simulation-Based Engineering Lab. The researchers discovered discrepancies between the Earth-based testing and the Chrono physics simulation. Image Credit: Joel Hallberg
Building an under-massed engineering version of a rover can mimic the gravity felt by the rover. But it can't tell you anything about how the ground itself behaves. That's where a physics simulation called Project Chrono comes in.
NASA was developing a mission called VIPER before it was cancelled in 2024 due to cost overruns. VIPER stands for Volatiles Investigating Polar Exploration Rover, and its mission was to map water ice in shadowed craters on the Moon's south pole region. Negrut and his colleagues developed Project Chrono to model complex systems like rovers interacting with different surfaces. "We developed such a physics-based simulator and utilized it to gauge the mobility of early prototypes of the Volatiles Investigating Polar Exploration Rover," the authors write in their research article.
When the team was simulating VIPER's performance, they discovered discrepancies between their simulation results and the Earth-based testing results. They worked with Chrono to determine what was going on. "If one reduced the rover mass for Earth testing, a light rover would be placed on granular material acted upon by the Earth's gravitational pull, leading to overoptimistic performance for the nominal rover when deployed on a celestial body of lower gravity," the researchers explain in their article.
 This schematic illustrates the workflow in the group's simulations and testing. The experimental test results are used to validate the simulator, which is subsequently used to predict the VIPER rover's performance on the Moon. Image Credit: Hu et al. 2025. Journal of Field Robotics.
This schematic illustrates the workflow in the group's simulations and testing. The experimental test results are used to validate the simulator, which is subsequently used to predict the VIPER rover's performance on the Moon. Image Credit: Hu et al. 2025. Journal of Field Robotics.
Chrono is free to use and publicly available worldwide, and hundreds of organizations are employing it to model complex mechanical systems. These include the US army's wheeled vehicles and tanks, as well as things like precision watches. "The simulator, which is open-source and publicly available, also supports studies for in situ resource utilization activities, for example, digging, bulldozing, and berming, in low-gravity environments," the paper states.
 This schematic shows the cosimulation framework used in the research. "The rover was modeled as a multibody system whose dynamics was solved using a multicore CPU," the researchers explain. "The deformable terrain was modeled as a continuum whose dynamics was solved using GPU computing. The two modules communicated passing force and torque information from the terrain to the rover; and position, velocity, orientation, and angular velocity coming from each wheel and going to the terrain CRM solver." Image Credit: Hu et al. 2025. Journal of Field Robotics.
This schematic shows the cosimulation framework used in the research. "The rover was modeled as a multibody system whose dynamics was solved using a multicore CPU," the researchers explain. "The deformable terrain was modeled as a continuum whose dynamics was solved using GPU computing. The two modules communicated passing force and torque information from the terrain to the rover; and position, velocity, orientation, and angular velocity coming from each wheel and going to the terrain CRM solver." Image Credit: Hu et al. 2025. Journal of Field Robotics.
“It’s rewarding that our research is highly relevant in helping to solve many real-world engineering challenges,” Negrut said. “I’m proud of what we’ve accomplished. It’s very difficult as a university lab to put out industrial-strength software that is used by NASA.”
“All our ideas are in the public domain and the competition can adopt them quickly, which is drives us to keep moving forward,” Negrut said. “We have been fortunate over the last decade to receive support from the National Science Foundation, U.S. Army Research Office and NASA. This funding has really made a difference, since we do not charge anyone for the use of our software.”
"Although this study drew on VIPER testing results and was meant to assess that rover's trafficability attributes, the lessons learned are relevant in the process of designing any wheeled or tracked rovers aimed to operate on the Moon, Mars, or other celestial bodies in low gravity," the researchers write in their article's conclusion. "The conclusion of this study is that full-vehicle tests on Earth augmented with simulations and GSLs (granular scaling laws) insights provide a framework that can anchor the design process of a vehicle operating in non-Earth gravitational fields."
"Ultimately, the results obtained in this effort make a case for relying heavily on physics-based terramechanics models when designing rovers and landers for extraterrestrial exploration," they conclude.